44 learning to drive from simulation without real world labels
PDF Urban Driving with Conditional Imitation Learning - GitHub Pages Recently, model-based reinforcement learning (RL) for learning driving from simulated LiDAR data by [19], but it has yet to be evaluated in real urban environments. Approaches with low dimensional data have shown promising results in off-road track driving [20]. Model-free RL has also been studied for real-world rural lane following [21]. Autonomous-Driving/SOTA For DRL&AD.md at master - GitHub Urban Driving with Conditional Imitation Learning, Wayve, 2019, paper. Learning to Drive from Simulation without Real World Labels, Wayve, 2018, paper. End-to-End Model-Free Reinforcement Learning for Urban Driving using Implicit Affordances, valeo, 2019, paper. OUR TOP TIPS FOR CONDUCTING ROBOTICS FIELD RESEARCH, 2019, blog
Yuxuan Liu | Papers With Code Learning to Drive from Simulation without Real World Labels. ... Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. ... Imitation learning is an effective approach for autonomous systems to acquire control policies when an explicit reward function is unavailable ...
Learning to drive from simulation without real world labels
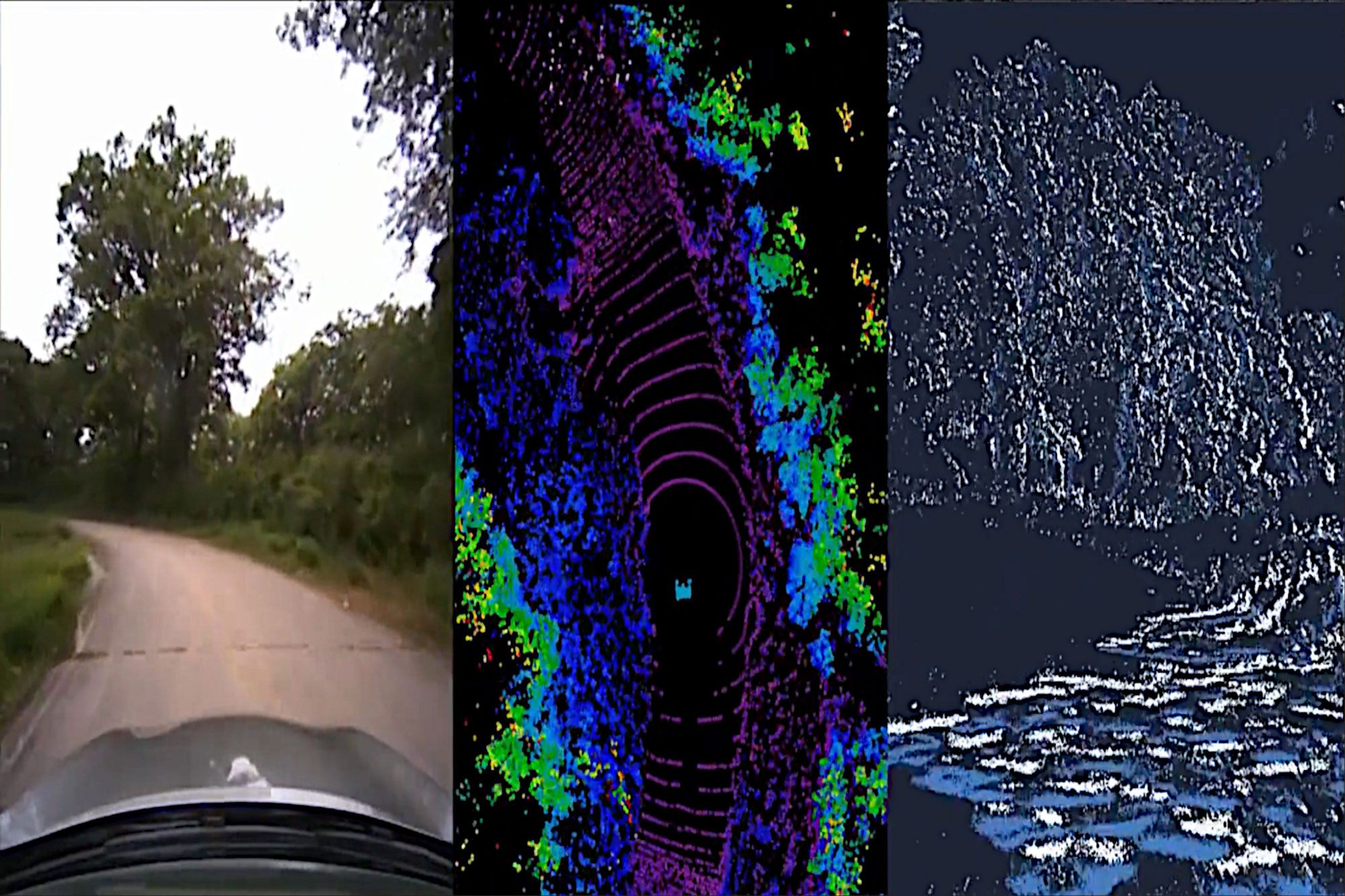
Learning to Drive from Simulation without Real World Labels Learning to drive in the simulation domain presents innumerous advantages: avoiding human casualties and expensive crashes, changing lightning and weather conditions, and reshaping structural... Technology | Wayve Learning to Drive from Simulation without Real World Labels. Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Proceedings of the International Conference on Robotics and Automation (ICRA). May, 2019. Learning to Drive in a Day. Edge Cases in Autonomous Vehicle Production - Datagen Comparison of simulated training and actual test environments in "Learning to Drive from Simulation without Real World Labels" (by Bewley et. al.) More recently, NVIDIA recently proposed a strategic approach named "imitation training" (Figure 7).
Learning to drive from simulation without real world labels. Sim2Real: Learning to Drive from Simulation without Real World Labels See the full sim2real blog: drive on real UK roads using a model trained entirely in simulation.Research paper: .... Research Roundup: Training with Synthetic Data - Datagen Learning to Drive from Simulation without Real World Labels (2018) Cambridge university researchers, working with a corporate team, teach a car to drive in a cartoon-like simulator. The novel idea was to teach the car to transcribe real-world data into its simulation-based understanding (real2sim) instead of attempting the reverse (sim2real). Publications - Home Jeffrey Hawke et al. Urban Driving with Conditional Imitation Learning. Proceedings of the International Conference on Robotics and Automation (ICRA), 2020. ... Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Learning to Drive from Simulation without Real World Labels. Proceedings of the International Conference on ... Learning to Drive from Simulation without Real World Labels Abstract: Simulation can be a powerful tool for under-standing machine learning systems and designing methods to solve real-world problems. Training and evaluating methods purely in simulation is often "doomed to succeed" at the desired task in a simulated environment, but the resulting models are incapable of operation in the real world.
Learning to Drive from Simulation without Real World Labels - CORE We are not allowed to display external PDFs yet. You will be redirected to the full text document in the repository in a few seconds, if not click here.click here. "Learning to Drive from Simulation without Real World Labels." - DBLP Bibliographic details on Learning to Drive from Simulation without Real World Labels. Stop the war! Остановите войну! ... "Learning to Drive from Simulation without Real World Labels." help us. How can I correct errors in dblp? ... Learning to Drive from Simulation without Real World Labels. ICRA 2019: 4818-4824. a service of ... Introduction to the CARLA simulator: training a neural network to ... Training neural network models on data gathered with two deterministic controllers and my non-deterministic self. Before we start, the source code for this whole project is available here. If you… Alex Bewley Learning to Drive from Simulation without Real World Labels. A method for transferring a vision-based lane following driving policy from simulation to operation on a rural road without any real-world labels. Our approach leverages recent advances in image-to-image translation to achieve domain transfer while jointly learning a single-camera ...
Learning Interactive Driving Policies via Data-driven Simulation Search ACM Digital Library. Search Search. Advanced Search Learning to drive from a world on rails | DeepAI To support learning from pre-recorded logs, we assume that the world is on rails, meaning neither the agent nor its actions influence the environment. This assumption greatly simplifies the learning problem, factorizing the dynamics into a nonreactive world model and a low-dimensional and compact forward model of the ego-vehicle. Learning Interactive Driving Policies via Data-driven Simulation the high-level pipeline of the proposed multi-agent data-driven simulation consists of (1) updating states for all agents, (2) recreating the world by projecting real-world image data to 3d space based on depth information, (3) configuring and placing meshes for all agents in the scene, (4) rendering the agent's viewpoint, and (5) post-processing … Simulation-Based Reinforcement Learning for Real-World Autonomous Driving This work presents a method for transferring a vision-based lane following driving policy from simulation to operation on a rural road without any real-world labels and assesses the driving performance using both open-loop regression metrics, and closed-loop performance operating an autonomous vehicle on rural and urban roads. 55 Highly Influential
Deep Reinforcement Learning for Autonomous Driving: A Survey
Learning Interactive Driving Policies via Data-driven Simulation ... the high-level pipeline of the proposed multi-agent data-driven simulation consists of (1) updating states for all agents, (2) recreating the world by projecting real-world image data to 3d space based on depth information, (3) configuring and placing meshes for all agents in the scene, (4) rendering the agent's viewpoint, and (5) post-processing …
Automotive - Automated Driving Systems - MATLAB & Simulink
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels By Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall Get PDF (3 MB) Abstract Simulation can be a powerful tool for understanding machine learning systems

Simulation Training, Real Driving | Wayve
Self-driving Research in Review: ICRA 2019 Digest - Medium Learning to Drive from Simulation without Real World Labels Paper from Wayve — Training a self-driving car in simulation as opposed to real-world is cheaper, faster and safer; however, such ...
Automotive - Automated Driving Systems - MATLAB & Simulink
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam, Alex Kendall Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems.

PDF) Learning to Drive from Simulation without Real World Labels
Learning to Drive from Simulation without Real World Labels Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. Training and evaluating methods purely in simulation is often "doomed to succeed" at the desired task in a simulated environment, but the resulting models are incapable of operation in the real world.

Learning to Drive from Simulation without Real World Labels ...
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam, Alex Kendall The authors are with Wayve in Cambridge, UK. Abstract Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems.

Google AI Blog: Learning an Accurate Physics Simulator via ...
论文笔记 Learning to Drive from Simulation without Real World Labels 文章对自己的贡献进行了总结:. 1、We present the first example of an end-to-end driving policy transferred from a simulation domain with control labels to an unlabelled real-world domain. 2、利用模拟器,我们可以学习到超越在真实世界中常见驾驶分布的策略,消除了对多个摄像头或者数据增强 ...
Event Cameras, Event camera SLAM, Event-based Vision, Event ...
Deep Reinforcement and Imitation Learning for Self-driving Tasks We split this approach in two main groups: 1) Behavioral Cloning (BC), which is a supervised learning approach to the problem, so we need a paired data set of states and actions; and 2) Inverse Reinforcement Learning (IRL), which aims to extract a reward function from the expert demonstrations to train a RL agent.

Why deep-learning AIs are so easy to fool
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels Authors: Alex Bewley Queensland University of Technology Jessica Rigley University of Cambridge Yuxuan Liu Jeffrey Hawke Wayve Abstract...
Are You Still Using Real Data to Train Your AI?
Edge Cases in Autonomous Vehicle Production - Datagen Comparison of simulated training and actual test environments in "Learning to Drive from Simulation without Real World Labels" (by Bewley et. al.) More recently, NVIDIA recently proposed a strategic approach named "imitation training" (Figure 7).

Sim2Real: Learning to Drive from Simulation without Real ...
Technology | Wayve Learning to Drive from Simulation without Real World Labels. Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Proceedings of the International Conference on Robotics and Automation (ICRA). May, 2019. Learning to Drive in a Day.

Car Driving School Simulator
Learning to Drive from Simulation without Real World Labels Learning to drive in the simulation domain presents innumerous advantages: avoiding human casualties and expensive crashes, changing lightning and weather conditions, and reshaping structural...
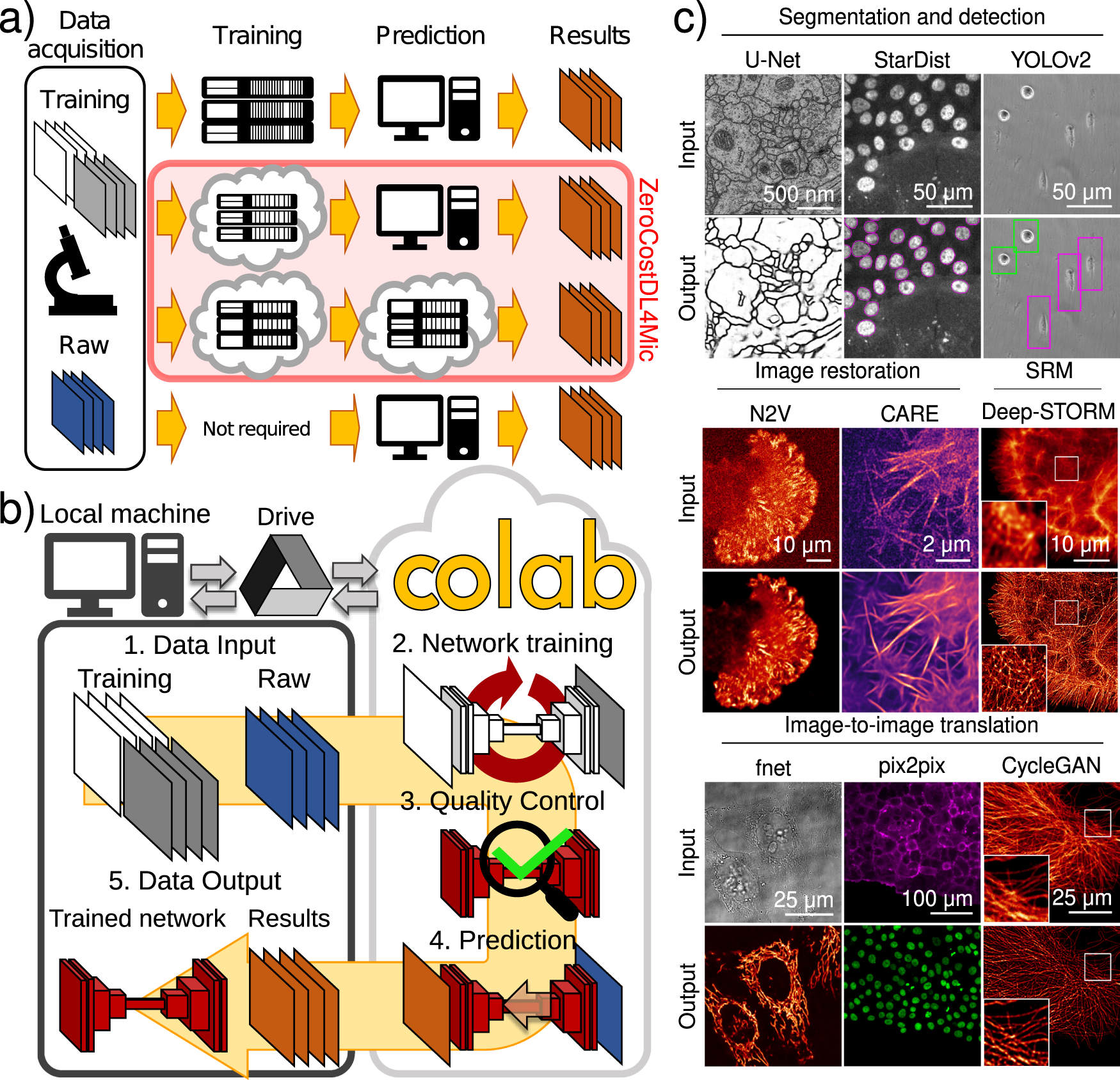
Democratising deep learning for microscopy with ...

Learning to Drive Smoothly in Minutes | by Antonin RAFFIN ...

Generative Adversarial Networks: Create Data from Noise | Toptal

Agents, environments, scenarios: A framework for examining ...
![PDF] Learning to Drive from Simulation without Real World ...](https://d3i71xaburhd42.cloudfront.net/1254306ab0e1c8e179d9f31b4b9ea0cef7398bd8/3-Figure3-1.png)
PDF] Learning to Drive from Simulation without Real World ...

Sim2Real: Learning to Drive from Simulation without Real ...

Research Roundup: Training with Synthetic Data - Datagen

Frontiers | AR DriveSim: An Immersive Driving Simulator for ...

Learning to Drive from Simulation without Real World Labels ...

Learning to Drive Smoothly in Minutes | by Antonin RAFFIN ...

Deep Learning Summit London 2019 - Day 1 - HackMD
![PDF] Learning to Drive from Simulation without Real World ...](https://d3i71xaburhd42.cloudfront.net/1254306ab0e1c8e179d9f31b4b9ea0cef7398bd8/3-Figure2-1.png)
PDF] Learning to Drive from Simulation without Real World ...

Learning to Drive from Simulation without Real World Labels ...

Learning to Drive Smoothly in Minutes | by Antonin RAFFIN ...

Learning to Drive from Simulation without Real World Labels ...

PDF) Learning to Drive from Simulation without Real World Labels

MIT and Toyota release innovative dataset to accelerate ...
UvA autonomous driving: Labbook 2020

Virtual-Based Safety Testing for Self-Driving Cars from ...

Learning Robust Control Policies for End-to-End Driving in Simulation | RA-L/ICRA 2020

Learning to Drive from Simulation without Real World Labels ...
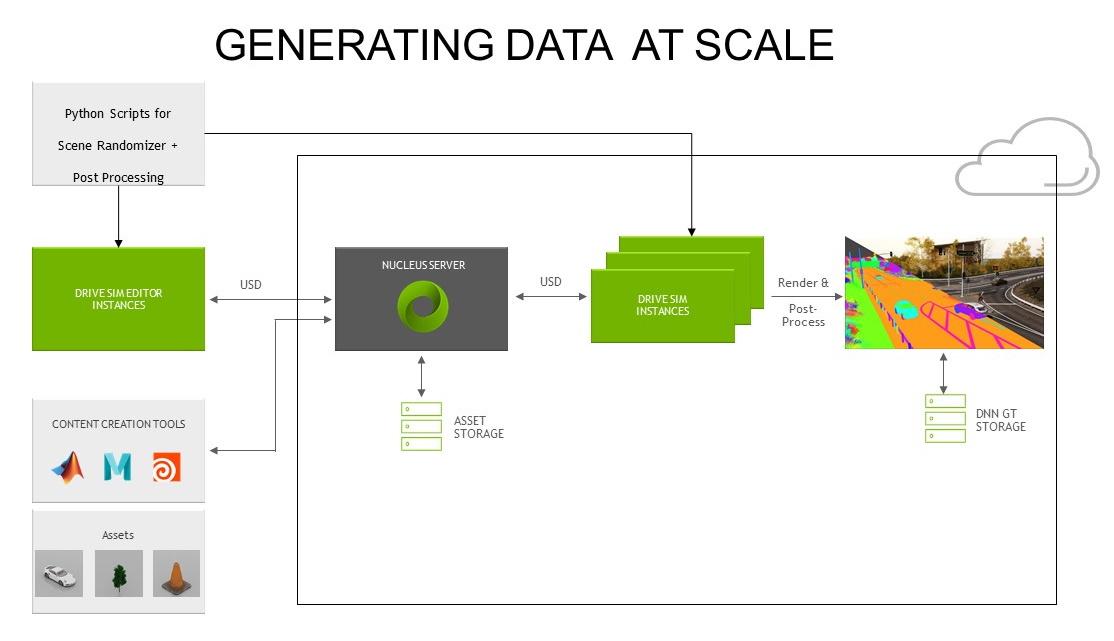
What Is Synthetic Data? | NVIDIA Blogs

Sim2Real: Learning to Drive from Simulation without Real ...

Car Racing Highway Driving Simulator, real parking driver sim speed traffic deluxe 2022
![PDF] Learning to Drive from Simulation without Real World ...](https://d3i71xaburhd42.cloudfront.net/1254306ab0e1c8e179d9f31b4b9ea0cef7398bd8/4-Figure4-1.png)
PDF] Learning to Drive from Simulation without Real World ...
STANDARDIZATION FOR HIGHLY AUTOMATED DRIVING

Frontiers | Driving Skills of Individuals With and Without ...

Enabling Real-World Object Manipulation with Sim-to-Real ...
Look Ma, No For-Loops: Array Programming With NumPy – Real Python
Researchers release open-source photorealistic simulator for ...
Deep Understanding Tesla FSD Part 4: Auto Labeling ...

How Drive.ai Is Mastering Autonomous Driving With Deep ...
Post a Comment for "44 learning to drive from simulation without real world labels"